已解决
ROS navigation栅格地图原点位置如何确定?
来自网友在路上 11158115提问 提问时间:2023-11-21 09:48:34阅读次数: 115
最佳答案 问答题库1158位专家为你答疑解惑
背景
利用ros进行导航时,生成一张栅格地图,包含gridMap.pgm和gridMap.yaml。现在想要将栅格地图及轨迹在其他应用上显示,需要确定地图的坐标系原点。
gridMap.yaml格式
image: gridMap.pgm #文件名
resolution: 0.20000 #地图分辨率 单位:米/像素
origin: [-129.999994, -114.000002, 0.000000] #图像左下角在地图坐标下的坐标
negate: 0 #是否应该颠倒 白:自由/黑:占用
occupied_thresh: 0.65 #占用概率大于此阈值的像素被认为已完全占用
free_thresh: 0.196 #用率小于此阈值的像素被认为是完全空闲的
原点(坐标系)确定
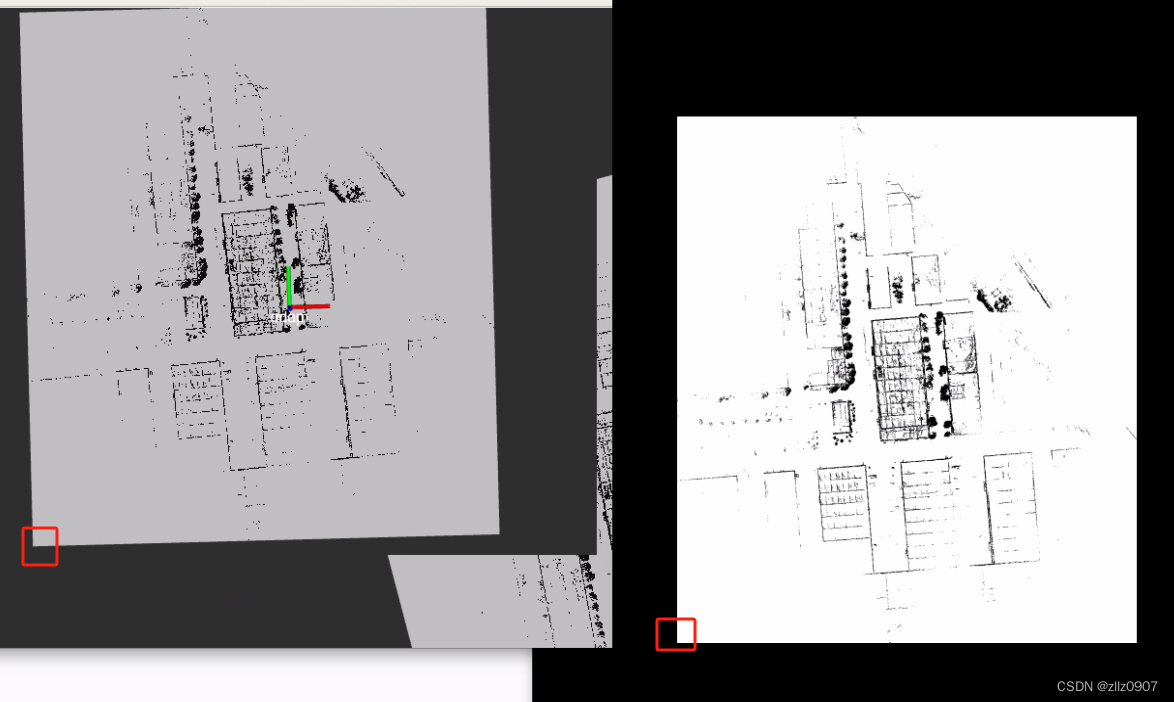
如下图所示,yaml文件中的origin代表的是图像左下角在地图坐标下的坐标,因此可在pgm图片中画出坐标系位置,图中红色为x轴,绿色为y轴。
查看全文
99%的人还看了
相似问题
- ROS navigation栅格地图原点位置如何确定?
- vue中使用echarts实现省市地图绘制,根据数据显示不同区域颜色,点击省市切换,根据经纬度打点
- vue使用本地图片设置为默认图
- html使用天地图写一个地图列表
- 解决 uniapp 开发微信小程序 不能使用本地图片作为背景图 问题
- uniapp地图手动控制地图scale
- uniapp中使用render.js进行openers、arcgis等地图操作
- Vue+OpenLayers 创建地图并显示鼠标所在经纬度
- 漏刻有时百度地图API实战开发(1)华为手机无法使用addEventListener click 的兼容解决方案
- 高德地图获取定位报错:INVALID_USER_SCODE(无效用户代码)
猜你感兴趣
版权申明
本文"ROS navigation栅格地图原点位置如何确定?":http://eshow365.cn/6-41117-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!
- 上一篇: 百云齐鲁 | 云轴科技ZStack成功实践精选(山东)
- 下一篇: mysql 设置远程登录