自动驾驶学习笔记(五)——绕行距离调试
最佳答案 问答题库588位专家为你答疑解惑
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门
文章目录
前言
调试内容
打开在线编辑器
打开planning代码
修改障碍物距离参数
仿真验证
对比分析
总结
前言
见《自动驾驶学习笔记(一)——Apollo平台》
见《自动驾驶学习笔记(二)——Apollo入门》
见《自动驾驶学习笔记(三)——场景设计》
见《自动驾驶学习笔记(四)——变道绕行仿真》
调试内容
车辆在行驶过程中,前方监测到静态障碍物后触发借道绕行,对绕行距离进行调试。
打开在线编辑器
在云实验室窗口点击左上角的![]() 按钮,打开代码在线编辑器,如下图所示:
按钮,打开代码在线编辑器,如下图所示:
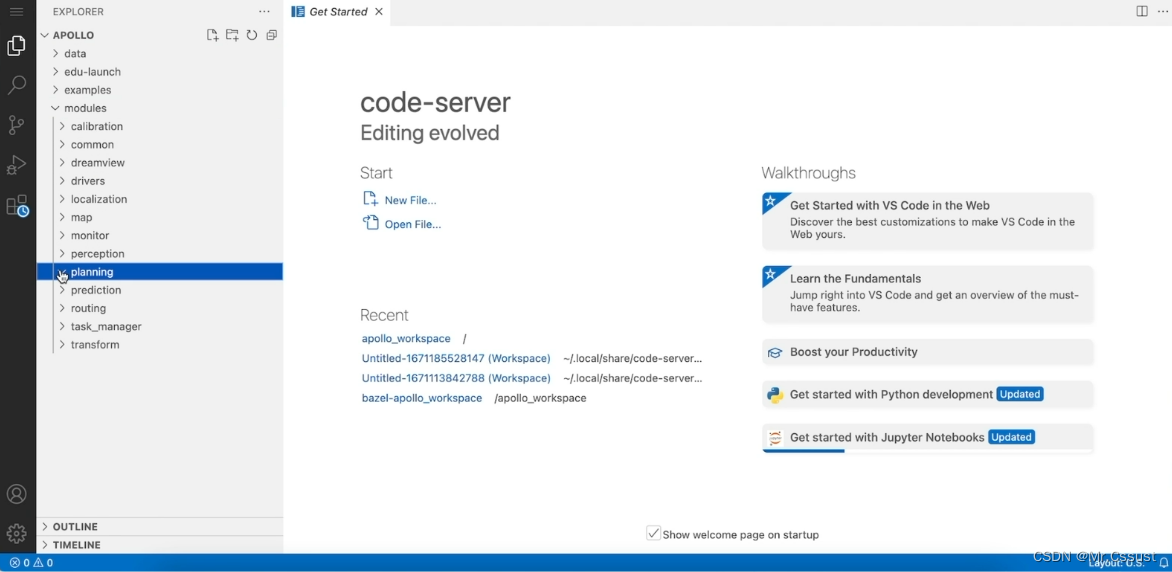
打开planning代码
使用菜单栏中的File->Open Folder功能,打开APOLLO文件夹,如下图所示:
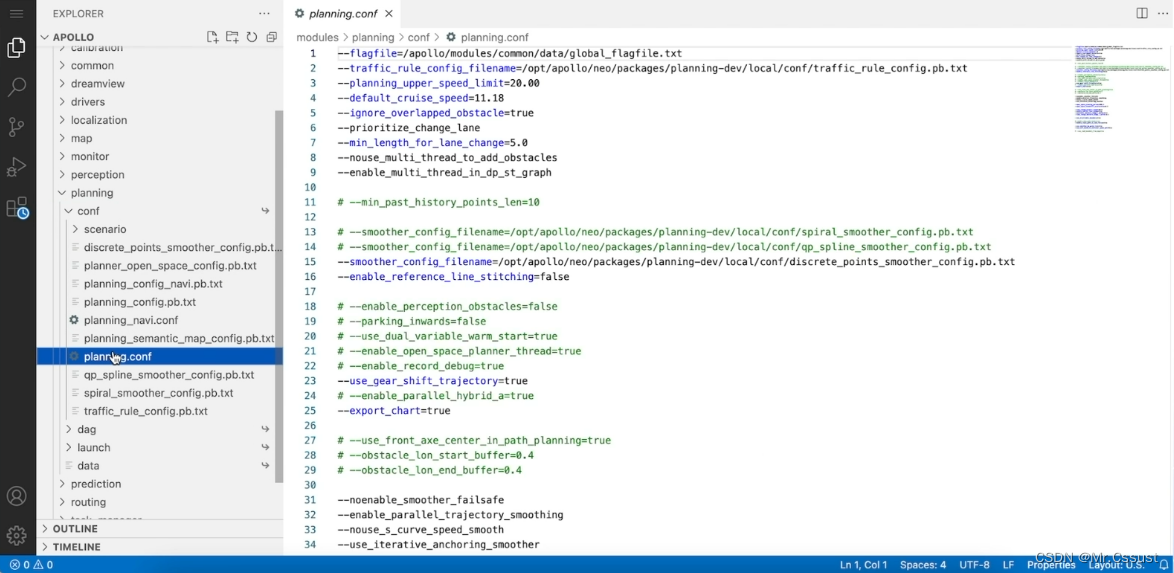
从左侧的目录栏中找到planning.conf文件,如下图所示:
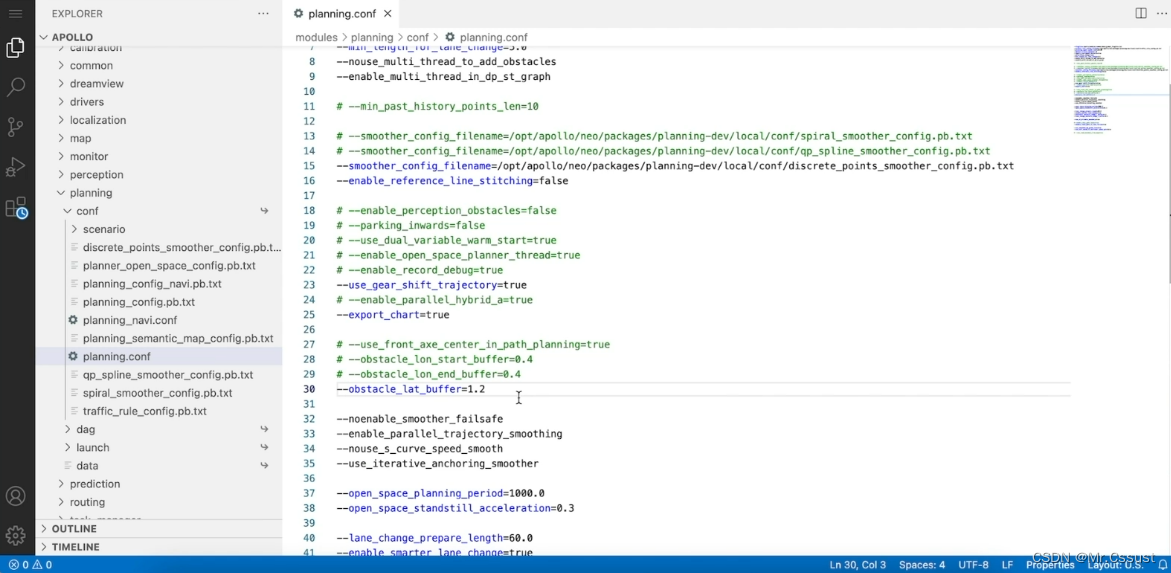
修改障碍物距离参数
在上述文件中输入指令--obstacle_lat_buffer=1.2,然后使用菜单栏中的File->Save功能保存代码。
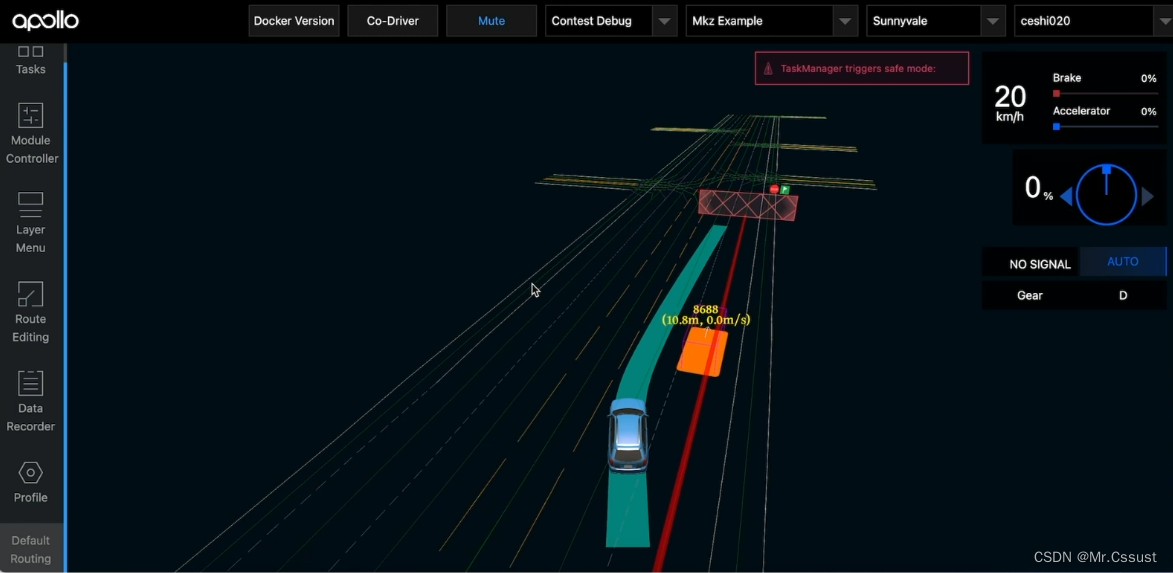
仿真验证
在dreamview的Module Controller一栏中,点击![]() 开关重新打开Planning模块。在Route Editing一栏中设置好主车行驶路径的起点和终点后,点击
开关重新打开Planning模块。在Route Editing一栏中设置好主车行驶路径的起点和终点后,点击 按钮就能看到主车行驶的仿真画面,如下图所示。
按钮就能看到主车行驶的仿真画面,如下图所示。
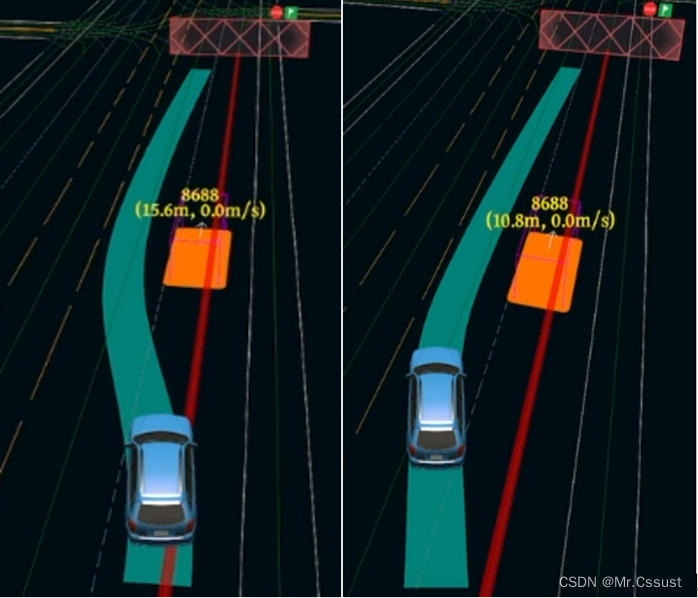
对比分析
如下,左图是默认的1m障碍物距离参数仿真的结果,右图是调整为1.2m后的仿真结果,可以明显看到绕行距离变远了。
总结
以上就是本人在学习自动驾驶时,对所学课程的一些梳理和总结。后续还会分享另更多自动驾驶相关知识,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
另外,如果有同在小伙伴,也正在学习或打算学习自动驾驶时,可以和我一同抱团学习,交流技术。
版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
文中部分图片来源自网络,若有侵权,联系立删。
99%的人还看了
相似问题
- Office文件在线预览大全-Word文档在线预览的实现方法-OFD文档在线预览-WPS文件在线预览
- 3D电路板在线渲染案例
- ky10 server x86 安装、更新openssl3.1.4(在线编译安装、离线安装)
- 【开题报告】疫苗在线预约小程序的设计与实现
- HarmonyOS从基础到实战-高性能华为在线答题元服务
- 基于Java的在线订票系统
- 【论文阅读】SPARK:针对视觉跟踪的空间感知在线增量攻击
- 在线客服系统源码 聊天记录实时保存 附带完整的搭建教程
- 在线预览excel,luckysheet在vue项目中的使用
- springboot+activiti5.22.0集成Activiti在线流程设计器
猜你感兴趣
版权申明
本文"自动驾驶学习笔记(五)——绕行距离调试":http://eshow365.cn/6-19833-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!