ROS 学习应用篇(九)ROS中launch文件的实现
最佳答案 问答题库618位专家为你答疑解惑
launch文件就好比一个封装好的命令库,我们按照在终端中输入的代码指令,全部按照launch语言格式封装在一个launch文件中,这样以后执行的时候,就可以不用开很多终端,一条一条输入代码指令。
lauch文件的语言风格很想我之前学爬虫的时候网页代码的风格。(rosmaster也不用单开了。)

launch
<launch>根元素用<launch>标签来定义<launch>
node
<node node中封装的时是启动节点/ >
语法:
<node pkg="package-name(功能包的名字)" type="executable-name(执行器名字。其实就是代码中定义的节点名字,之前我们在CMakeList中把cpp文件做成一个可执行文件,就是那个名字,py的程序就是多个.py)" name="(这里是,该节点运行后的节点名字,其实就终端执行时,__name):=新定义的节点的名字"/>

其余可选属性
以下可选属性是和name、pkg、type同级的,均用空格间隔即可。
output:控制打印当前节点信息到当前终端中
respawn:控制当节点出错是,是否重启节点的
required:控制某个节点是否一定要启动的
ns:全称是name space,给节点加命名空间前缀的,避免节点见的冲突。
args:给节点输入参数的。C++用这个,py用的param送入value值


C++ Python
参数设置
这一段特别的是在向一个节点送入参数的视乎,node最后没有/,在param语句结束后要加一行</node>
param
用于设置ROS系统中运行中的参数,并存在参数服务器中。
<param name="output_frame" value="odom" />
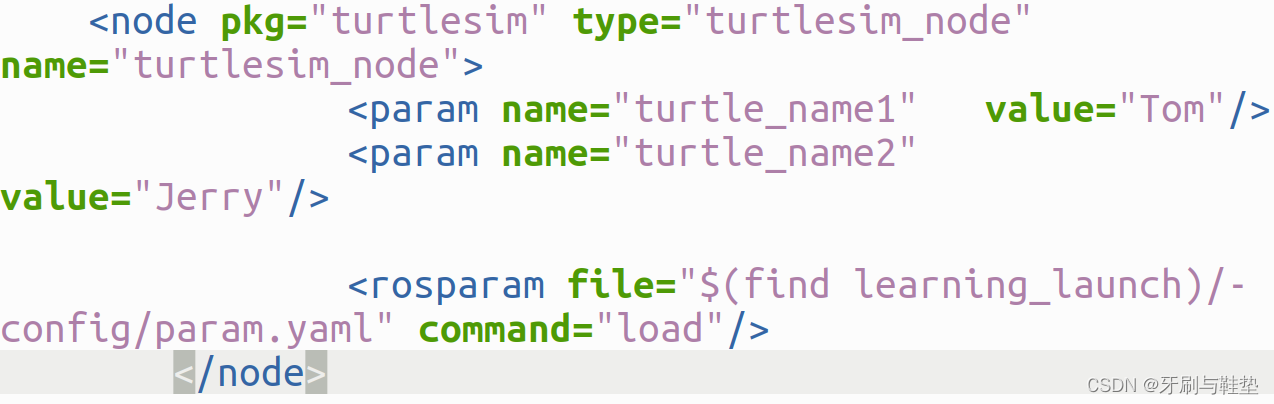

封装在节点内的参数,就在名称前多出来节点名那一段的命名空间,比如说turtle_name1前面有节点命名。
rosparam
用于加载参数文件中的多个参数。
<rosparam file="param.yaml" command="load" ns="params" />

arg
用于launch文件内部的局部变量,仅限于launch文件使用。注意它和全局参数param的区别,其实就是全局变量和局部变量的区别。定义方法如下:
<arg name="arg-name" default="arg-value"/>
哪么如何调用这个arg定义的参数呢。既然说了是launch文件内部的参数,自然也智能在文件内部调用。
<param name="foo" value="$(arg arg-name)" />
<node name="node" pkg="package" type="type" args="$(arg arg-name)" / >
remap
重映射,就是改那些带有/的名字,也就是那些消息,服务的名字,这通常使用在节点输出通讯联络节点变更导致的映射关系发生变化的情况下。from:原名,同:映射之后的命名。
<remap form="turtlebot/cmd_vel" to="/cmd_vel" />
include
像c++ 语言一样引入其他launch文件。
<include file="$(dirname)/other.launch" />
更多标签可见wiki.ros.org/roslaunch/XML
编译
roslaunch learning_launch simple.launch
99%的人还看了
相似问题
- 〖大前端 - 基础入门三大核心之JS篇㊲〗- DOM改变元素节点的css样式、HTML属性
- Java 算法篇-链表的经典算法:判断回文链表、判断环链表与寻找环入口节点(“龟兔赛跑“算法实现)
- 代码随想录二刷 | 链表 | 删除链表的倒数第N个节点
- 节点导纳矩阵
- bhosts 显示节点 “unreach“ 状态
- 电子电器架构 —— 车载网关边缘节点总线转换
- 〖大前端 - 基础入门三大核心之JS篇㊳〗- DOM访问元素节点
- 第四天||24. 两两交换链表中的节点 ● 19.删除链表的倒数第N个节点 ● 面试题 02.07. 链表相交 ● 142.环形链表II
- CS224W5.1——消息传递和节点分类
- Vue报错解决Error in v-on handler: “Error: 无效的节点选择器:#div1“
猜你感兴趣
版权申明
本文"ROS 学习应用篇(九)ROS中launch文件的实现":http://eshow365.cn/6-38860-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!
- 上一篇: MySQL 的执行原理(一)
- 下一篇: Word中NoteExpress不显示的问题