已解决
移动机器人运动规划 --- 基于图搜索的Dijkstra算法
来自网友在路上 152852提问 提问时间:2023-09-22 23:08:48阅读次数: 52
最佳答案 问答题库528位专家为你答疑解惑
移动机器人运动规划 --- 基于图搜索的Dijkstra算法
- Dijkstra 算法
- Dijkstra 算法 伪代码流程
- Dijkstra 算法步骤示例
- Dijkstra算法的优劣分析
Dijkstra 算法
Dijkstra 算法与BFS算法的区别就是 : 从容器中弹出接下来要访问的节点的规则不同
BFS 弹出: 层级最浅的原则,队列里最下方的元素
Dijkstra 弹出: 代价最小的节点g(n)
g(n) :表示的是从开始节点到当前n节点的代价累加
Dijkstra在扩展的时候,同时考虑从n节点扩展所有可扩展节点的代价g(),如果某个节点m的代价g(m)比g(n)要小,则更新当前代价为g(m)
Dijkstra的最优性保证:图运行的过程中,任何一个被扩展或者访问的节点,保证存储的代价g()值是从起点节点开始到当前节点的最小值
Dijkstra 算法 伪代码流程
维护一个优先级队列,存储所有被扩展的节点,且节点按g()值的大小自动按从小到大排列。
-优先级队列首先为空,以起始节点Xs进行初始化-起始节点g(Xs)=0,并且初始化其它节点的代价为无穷大-循环:1、如果队列是空的,返回false,跳出循环2、弹出优先级队列中代价最小的节点n3、标记节点n为被扩展节点4、如果节点n为目标节点,返回true,跳出循环5、找到n节点周围可以扩展的所以节点(没被扩展过)m6、进行判断 如果g(m)为无穷大(说明其它节点也没发现过m),7、则计算 真正的g(m)=g(n)+Cnm,然后将m节点加入到优先级队列中8、进行判断 如果g(m)不为无穷大,有值了(说明其它节点发现过m,m已经在优先级队列中)9、再次进行判断 如果之前发现m时计算的g(m)比g(n)+Cnm大的话10、更新g(m)=g(n)+Cnm。11、重复循环至步骤1-结束循环
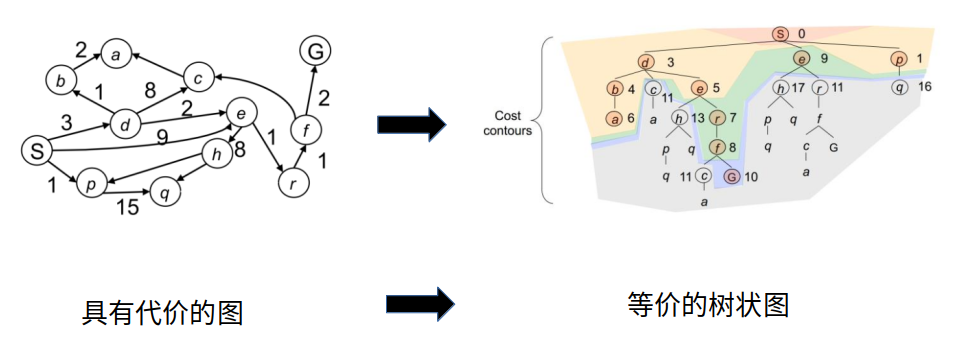
Dijkstra 算法步骤示例
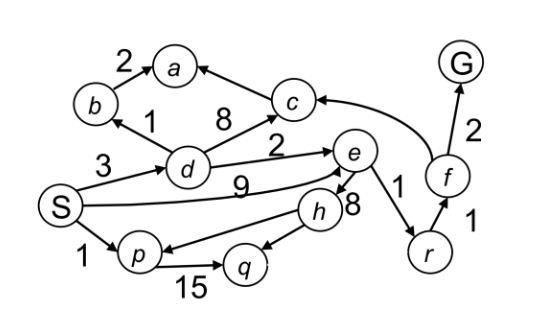
以这个图将Dijkstra 算法运行的步骤进行一个示例:
1、首先初始化队列,将起始节点放入优先级队列中
2、弹出起始节点
3、扩展弹出节点周围的节点
起始节点S可以扩展到子节点d\e\p,并且计算各节点的g值
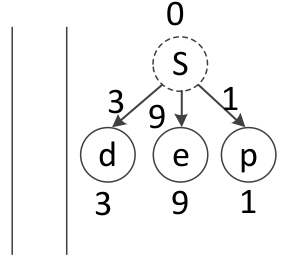
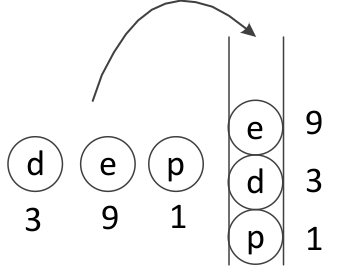
4、将扩展的节点加入到优先级队列中,并且进行排序
g§最小,放到队列最前面,也就是图中的最下面,然后是d,最后是e。
5、弹出最小的g值节点
也就是p节点
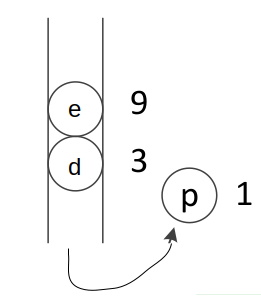
然后循环至步骤3,直至结束
Dijkstra算法的优劣分析
- 优点:完备的(如果问题有解,一定能找到解);最优的(找到的解一定是最优的)
- 缺点:没有目标终点方向的,只是比广度搜索多了一个代价值判断,如果每个边的代价都是1的话,那么就变成了广度搜索。
针对该缺点,与之对应的就是启发式搜索,例如贪心算法,根据到目标的进行一个启发式搜索。
如果Dijkstra的最优性与启发式搜索结合,使搜索具有方向性时,也就是 A*算法了。
查看全文
99%的人还看了
相似问题
- 〖大前端 - 基础入门三大核心之JS篇㊲〗- DOM改变元素节点的css样式、HTML属性
- Java 算法篇-链表的经典算法:判断回文链表、判断环链表与寻找环入口节点(“龟兔赛跑“算法实现)
- 代码随想录二刷 | 链表 | 删除链表的倒数第N个节点
- 节点导纳矩阵
- bhosts 显示节点 “unreach“ 状态
- 电子电器架构 —— 车载网关边缘节点总线转换
- 〖大前端 - 基础入门三大核心之JS篇㊳〗- DOM访问元素节点
- 第四天||24. 两两交换链表中的节点 ● 19.删除链表的倒数第N个节点 ● 面试题 02.07. 链表相交 ● 142.环形链表II
- CS224W5.1——消息传递和节点分类
- Vue报错解决Error in v-on handler: “Error: 无效的节点选择器:#div1“
猜你感兴趣
版权申明
本文"移动机器人运动规划 --- 基于图搜索的Dijkstra算法":http://eshow365.cn/6-11719-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!
- 上一篇: java服务内存说明及配置详解
- 下一篇: C8051F020 SMBus一直处于busy状态解决办法