已解决
【SLAM】10.纵观SLAM,对比方案和未来方向
来自网友在路上 162862提问 提问时间:2023-09-19 14:08:09阅读次数: 62
最佳答案 问答题库628位专家为你答疑解惑
"天下谁人配白衣”
- SLAM方案
- 研究方向
SLAM方案
站在历史角度,看一下为SLAM的发展带来贡献的方案:
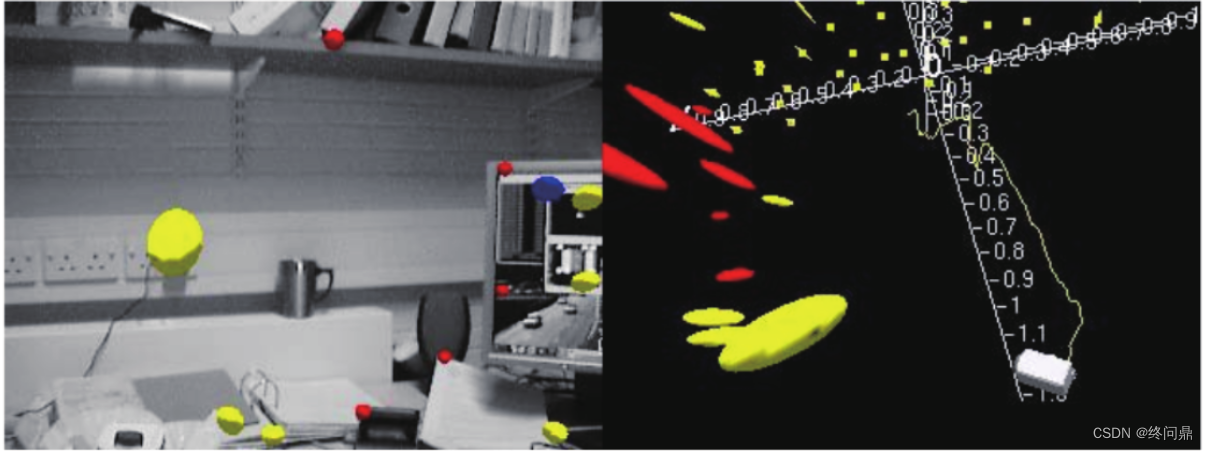
- 2007年—A.J.Davison—MonoSLAM
- 视觉SLAM的先驱,建立在EKF基础上,此前基本无法在线运行,意义较大;
- 应用场景窄;
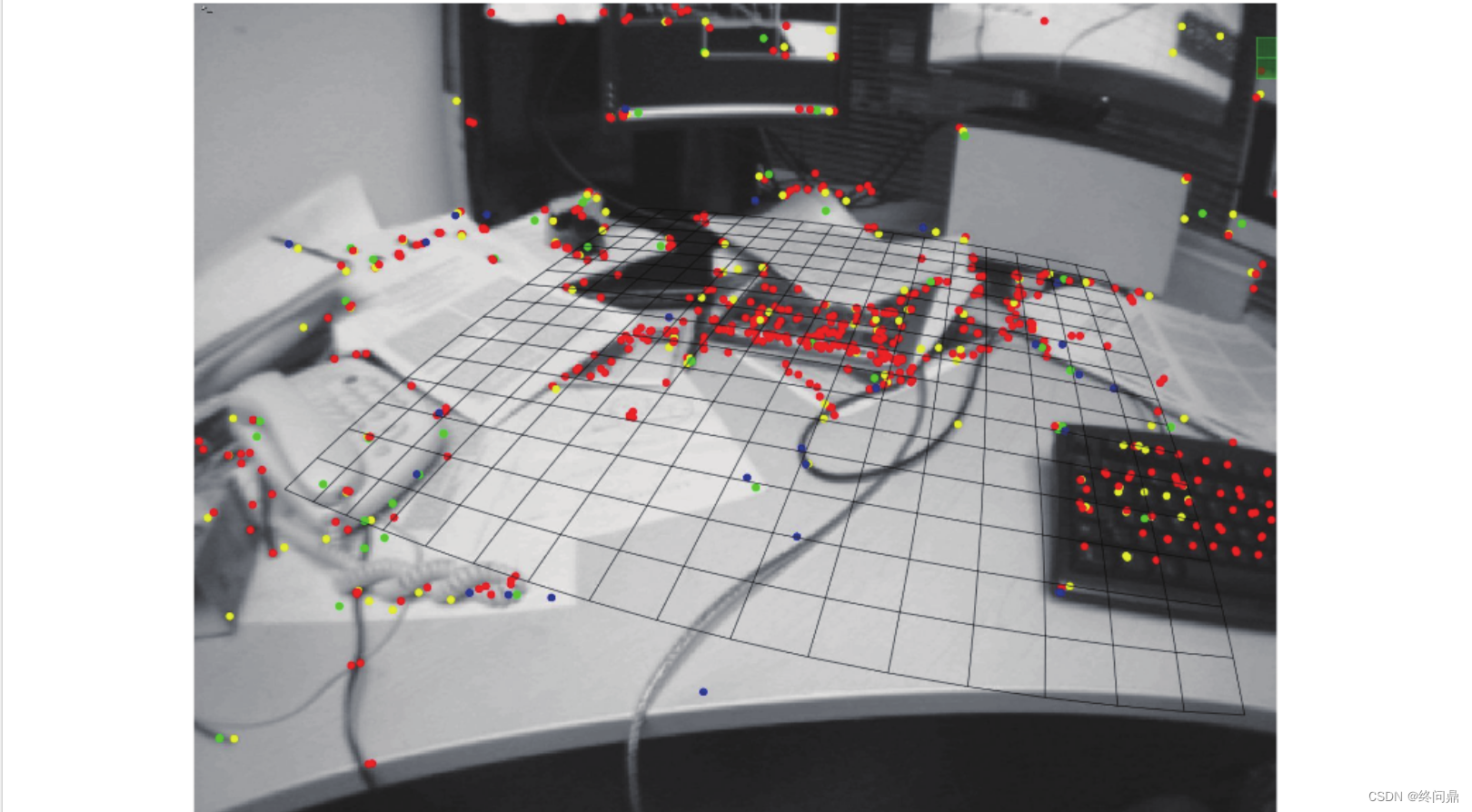
- 2007—Klein—PTAM
- 也是SLAM重要事件:双线程结构;跟踪部分实时响应,地图优化没必要实时,第一个使用非线性优化后端,引入关键帧机制,带有AR效果;
- 场景小跟踪容易丢失;
- 2014—J.Engle—LSD-SLAM
- 单目直接法 用直接法构建半稠密地图(不需要特征点),半稠密:估计梯度明显的像素位置。可在CPU上进行,极线搜索做法是极线等距取5点,度量SSD,深度估计采取随机数再归一化等,减小了尺度漂移;
- 直接法的缺点:对相机内参和曝光敏感,运动过快容易丢失,没有直接法的回环检测,依赖特征点;
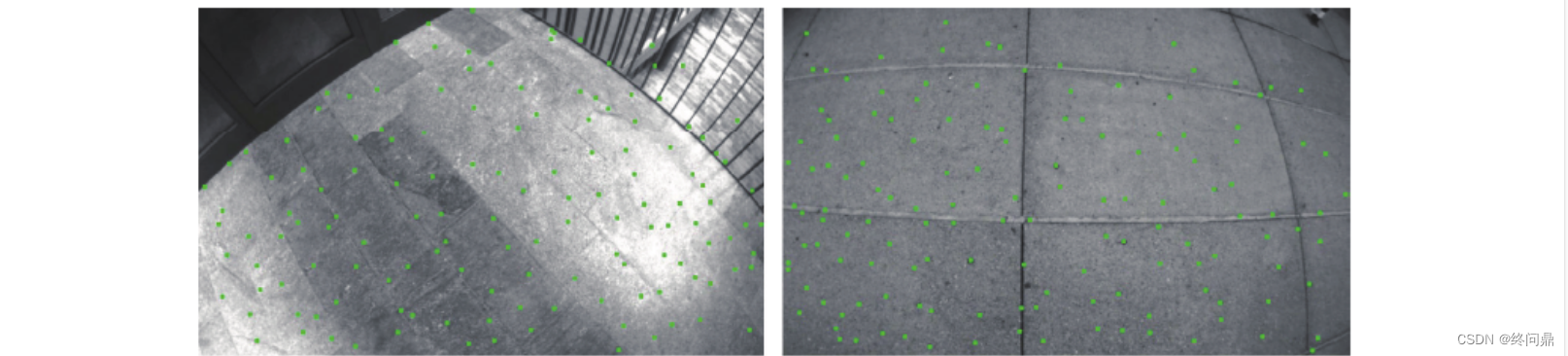
- 2014—Forster—SVO
- 半直接法 特征点与直接法混合使用,跟踪角点,没有描述子,直接根据关键点周围信息估计相机运动;4X4大小的块匹配,速度极快,SVO2.0可以达到400帧每秒,提出了深度滤波器;
- 只要是无人机俯视相机使用,平视表现不好,单目初始化等;舍弃了后端优化和回环检测,故称一个VO而非SLAM。
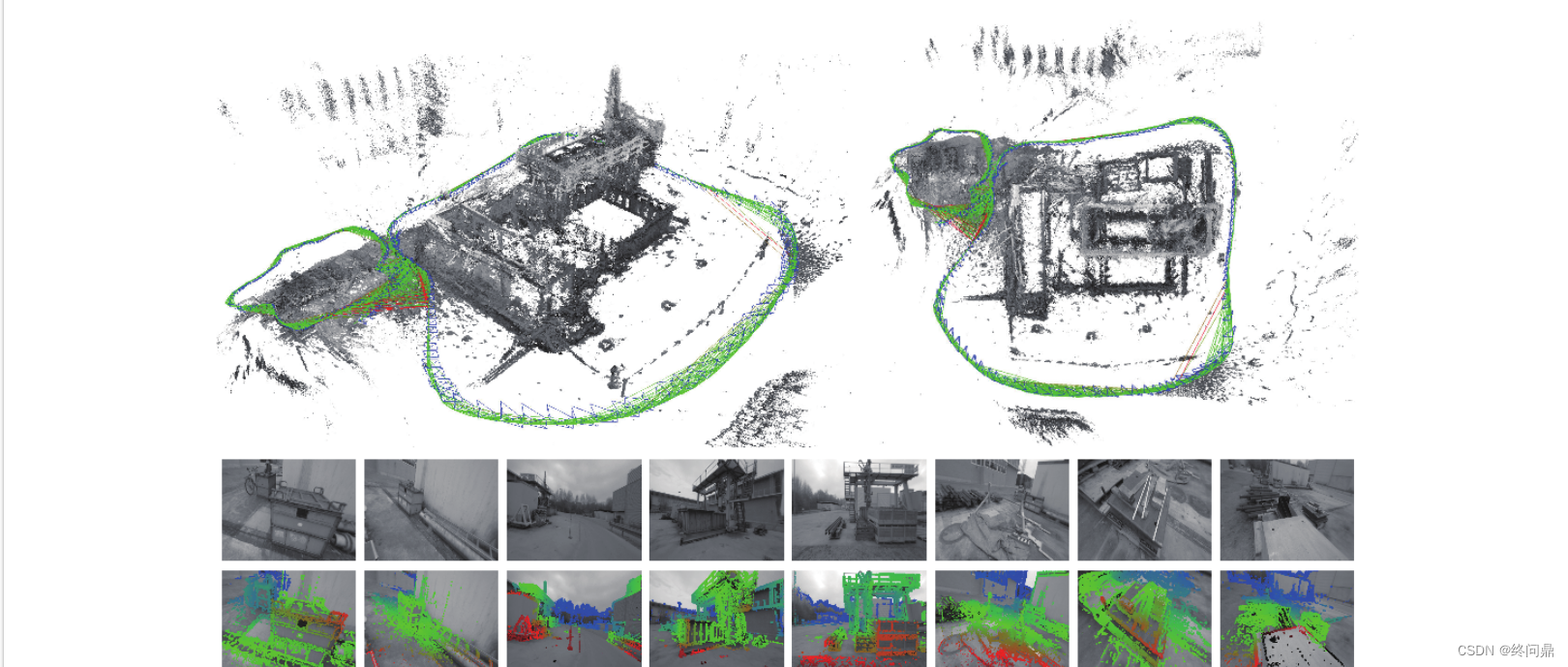
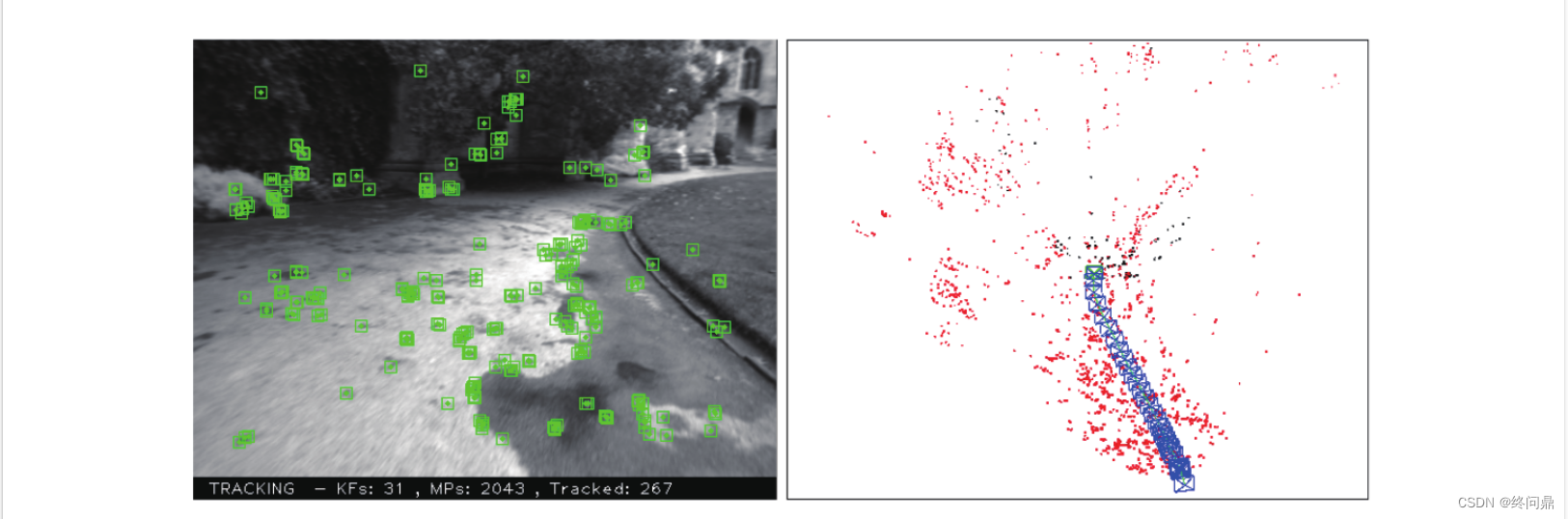
- 2015—PTAM的继承者—ORB-SLAM
- 特征点SLAM中的顶峰支持单目、双目、RGB-D模式;用ORB特征计算视觉里程计和回环检测的ORB字典,精度与效率折中;回环检测优秀,一个很大的ORB字典文件;三个线程完成SLAM,跟踪特征点、小图BA、大图全局位姿图和优化线程;
- 必须对每个图像都计算一遍ORB特征,耗时,三线程CPU负担,没有开放存储和读取地图后重定位,无法提供导航、避障、交互等。
- RTAB-MAP 是专用RGB-D SLAM的方案,基于特征的视觉里程计,基于词袋的回环检测,后端的位姿图优化以及点云和三角网格地图,完整庞大的SLAM方案。
其他一些方案可以在官网查找
研究方向
- 视觉+惯导 :具有明显互补性:
- IMU:角速度,加速度存在明显漂移,使积分两次得到的数据不可靠,但是短时间内快速运动,IMU能提供较好的估计;
- 相机:运动过快,运动模糊,重叠区域太少,数据基本不漂移,运动过快可以依靠IMU保持位姿估计;
- 图像变化时,不知道是相机自身运动还是外接环境变化,IMU却可以感受到;
复杂的VIO
- 语义SLAM
结合深度学习
- 语义帮助SLAM:给图带标签,得到带标签的地图,有助于与回环检测和BA优化;
- SLAM帮助语义:深度学习上,从不同视角采集物体数据标定,辛苦。而在SLAM中可以估计相机运动,自动计算物体在图像中的位置,省去人工成本。
- 在深度学习之前,场景分割识别通过支持向量机,条件随机场等传统工具进行。使用深度学习后,很有前景
- 基于线/面特征的SLAM
- 动态场景下的SLAM
- 多机器人的SLAM
都有待探索。
我们正处在提出问题—寻找算法—完善算法 的第三个阶段,各位共勉!
查看全文
99%的人还看了
相似问题
- 【机器学习】特征工程:特征选择、数据降维、PCA
- 论文阅读:“基于特征检测与深度特征描述的点云粗对齐算法”
- 基于纹理特征的kmeas聚类的图像分割方案
- 基于像素特征的kmeas聚类的图像分割方案
- 分类预测 | Matlab实现PSO-GRU-Attention粒子群算法优化门控循环单元融合注意力机制多特征分类预测
- 特征缩放和转换以及自定义Transformers(Machine Learning 研习之九)
- 分类预测 | Matlab实现PSO-BiLSTM-Attention粒子群算法优化双向长短期记忆神经网络融合注意力机制多特征分类预测
- 以key为特征,分类多个信息(手机流量栗子)
- 【机器学习】特征工程:特征预处理,归一化、标准化、处理缺失值
- 004 OpenCV akaze特征点检测匹配
猜你感兴趣
版权申明
本文"【SLAM】10.纵观SLAM,对比方案和未来方向":http://eshow365.cn/6-9357-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!
- 上一篇: Vue框架分享与总结
- 下一篇: 【QT--使用百度地图API显示地图并绘制路线】