已解决
世界坐标系,相机坐标系,像素坐标系转换 详细说明(附代码)
来自网友在路上 11138113提问 提问时间:2023-11-19 00:26:56阅读次数: 113
最佳答案 问答题库1138位专家为你答疑解惑
几个坐标系介绍,相机内外参的回顾参考此文。
本文主要说明如何在几个坐标系之间转换。
本文涉及:
- 使用相机内参 在 像素坐标系 和 相机坐标系 之间转换。
- 使用相机外参(位姿)在相机坐标系 和 世界坐标系 之间转换。
- (qw,qx,qy,qz,tx,ty,tz)形式的外参如何使用。
- 以具体情景为例,每一步详细说明,并结合代码进一步理解每个步骤。
以下面的情景为例。
假设 I1 (img1) 上有一点p1,现在要通过相机1,相机2的内外参把p1映射到 I2 (img2)上的对应点p2.
还需要知道p1的深度,假设有img1的深度图,可以读取p1处的深度。
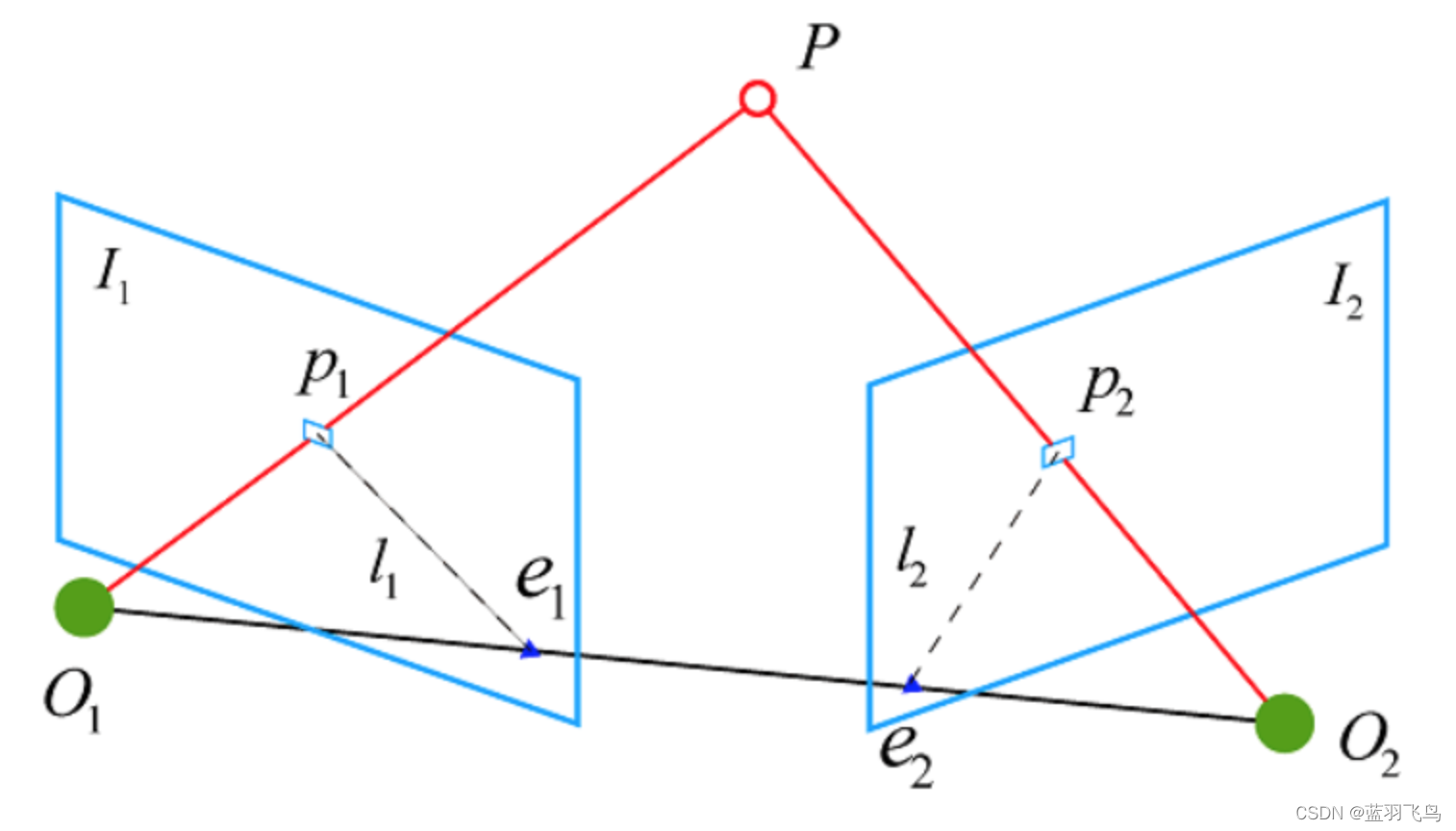
整体思路:
p1在图片 I1 上,是像素坐标系,根据camera1的内参把它转到camera1的相机坐标系,得到(xc1, yc1, zc1),
根据camera1的外参把 (xc1, yc1, zc1) 转到 世界坐标系,得到上图中的P点坐标(xw1, yw1, zw1),
根据camera2的外参把P点 (xw1, yw1, zw1) 转到camera2的相机坐
查看全文
99%的人还看了
相似问题
猜你感兴趣
版权申明
本文"世界坐标系,相机坐标系,像素坐标系转换 详细说明(附代码)":http://eshow365.cn/6-38784-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!
- 上一篇: uniapp-轮播图点击预览功能
- 下一篇: 最长公共子序列 递归