基于APM(PIX)飞控和missionplanner制作遥控无人车-从零搭建自主pix无人车无人坦克
最佳答案 问答题库738位专家为你答疑解惑
前面的步骤和无人机调试一样,可以参考无人机相关专栏。这里不再赘述。有一个重要的内容要测试,就是能正常运行的情况下关闭遥控器看车辆是什么状态,如果出现朝某个方向快速前进,可能设置有问题。
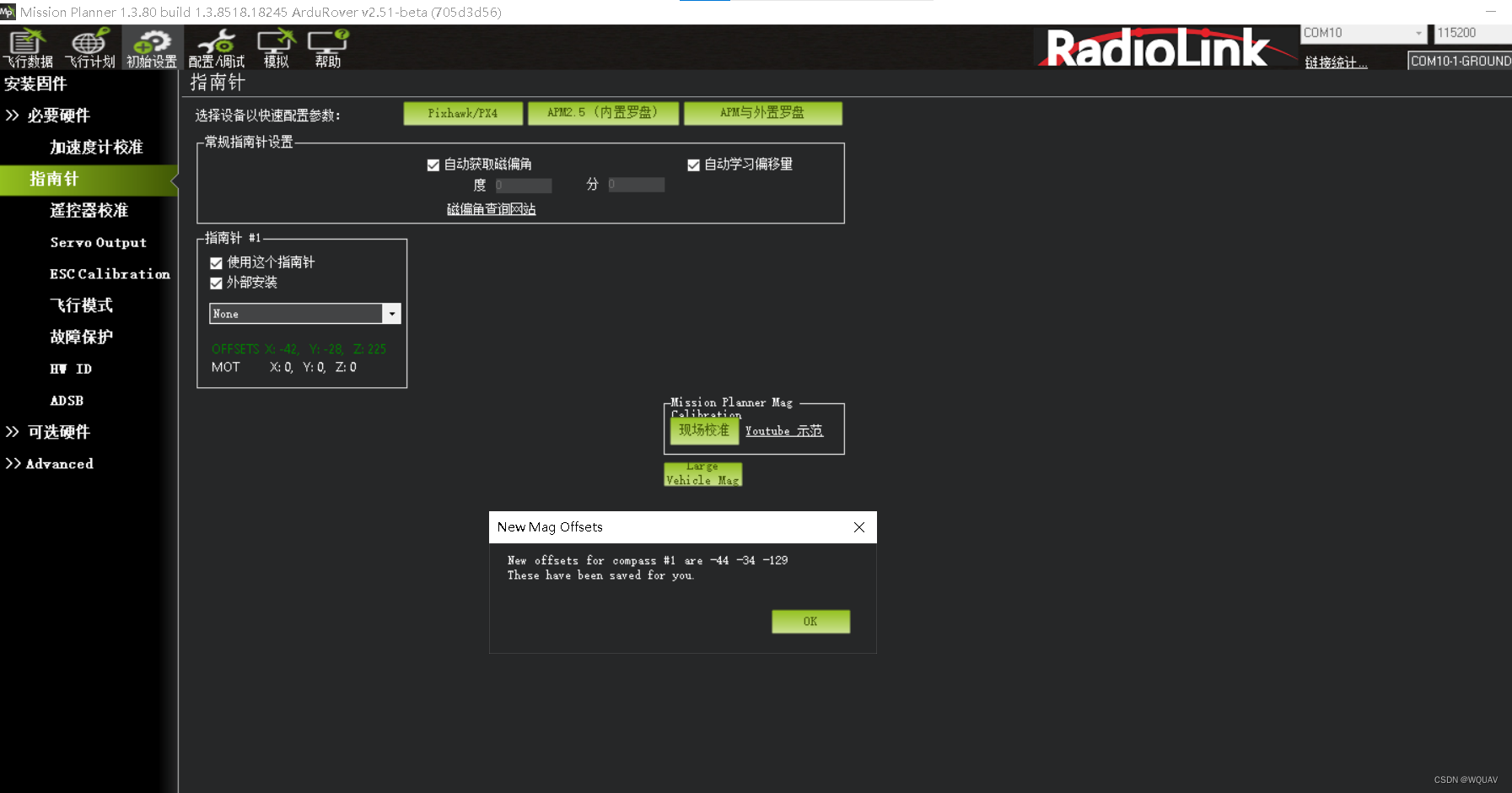
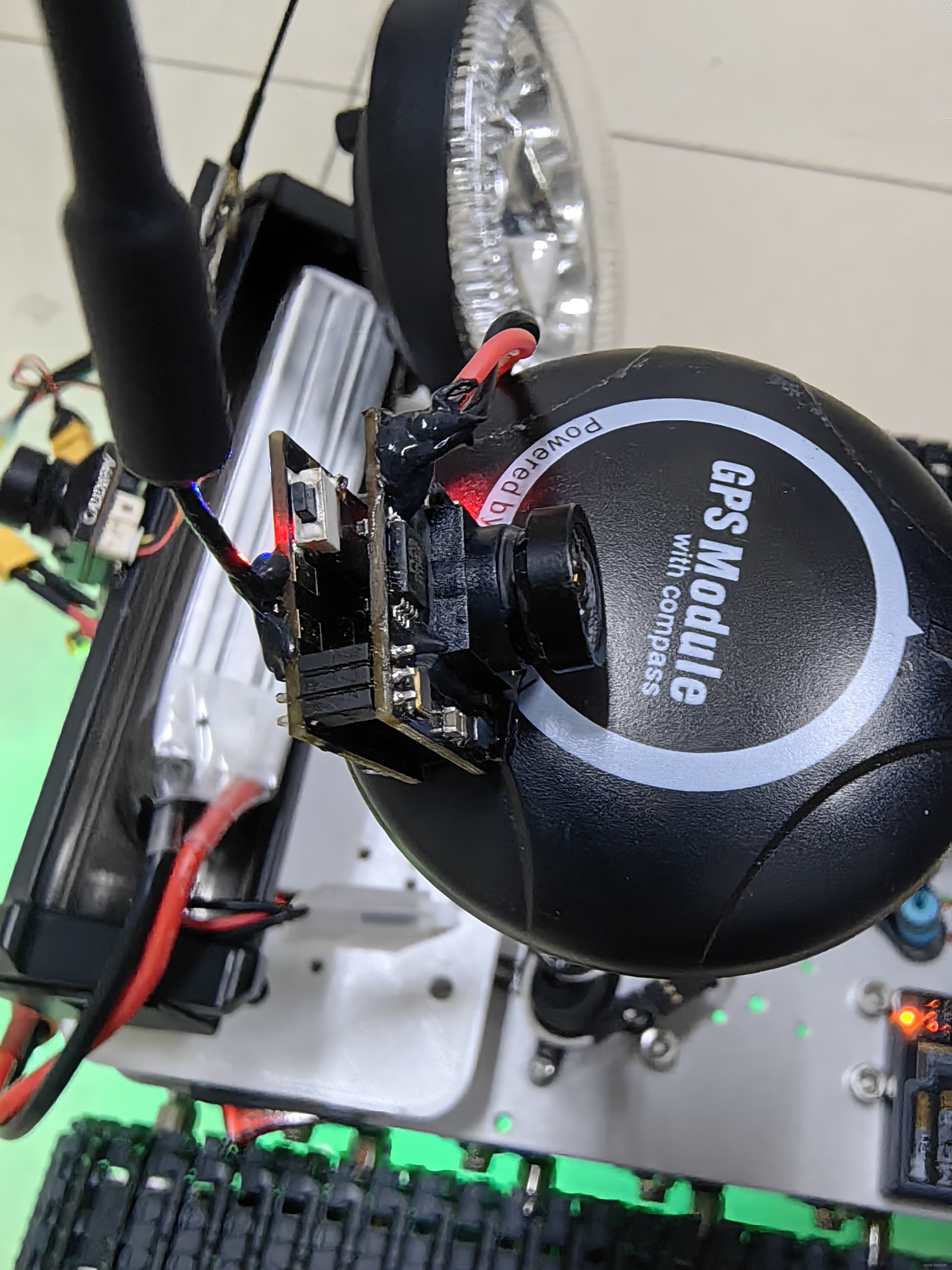
1.安装完rover的固件后,链接gps并进行校准。旋转小车不同方向,完成校准,弹出成功窗口。
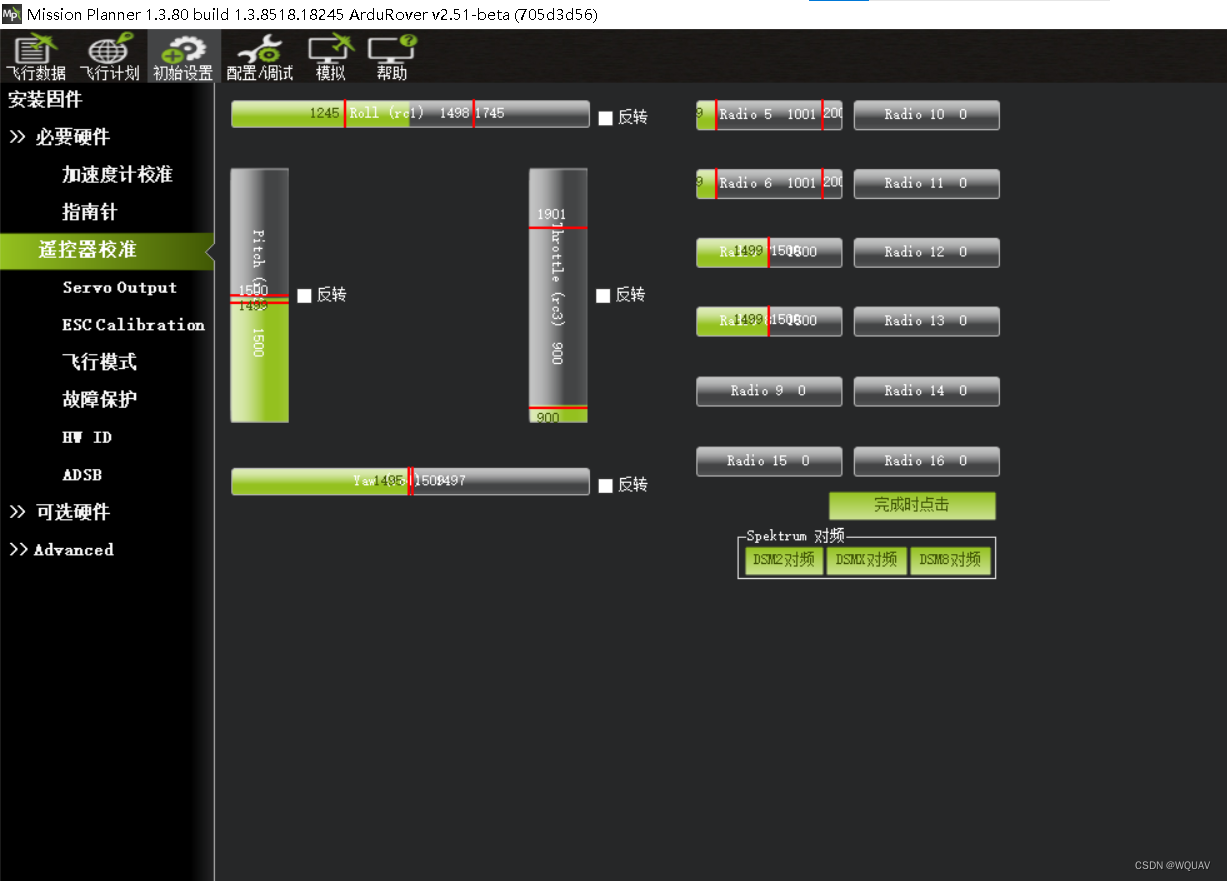
 2.校准遥控器。
2.校准遥控器。

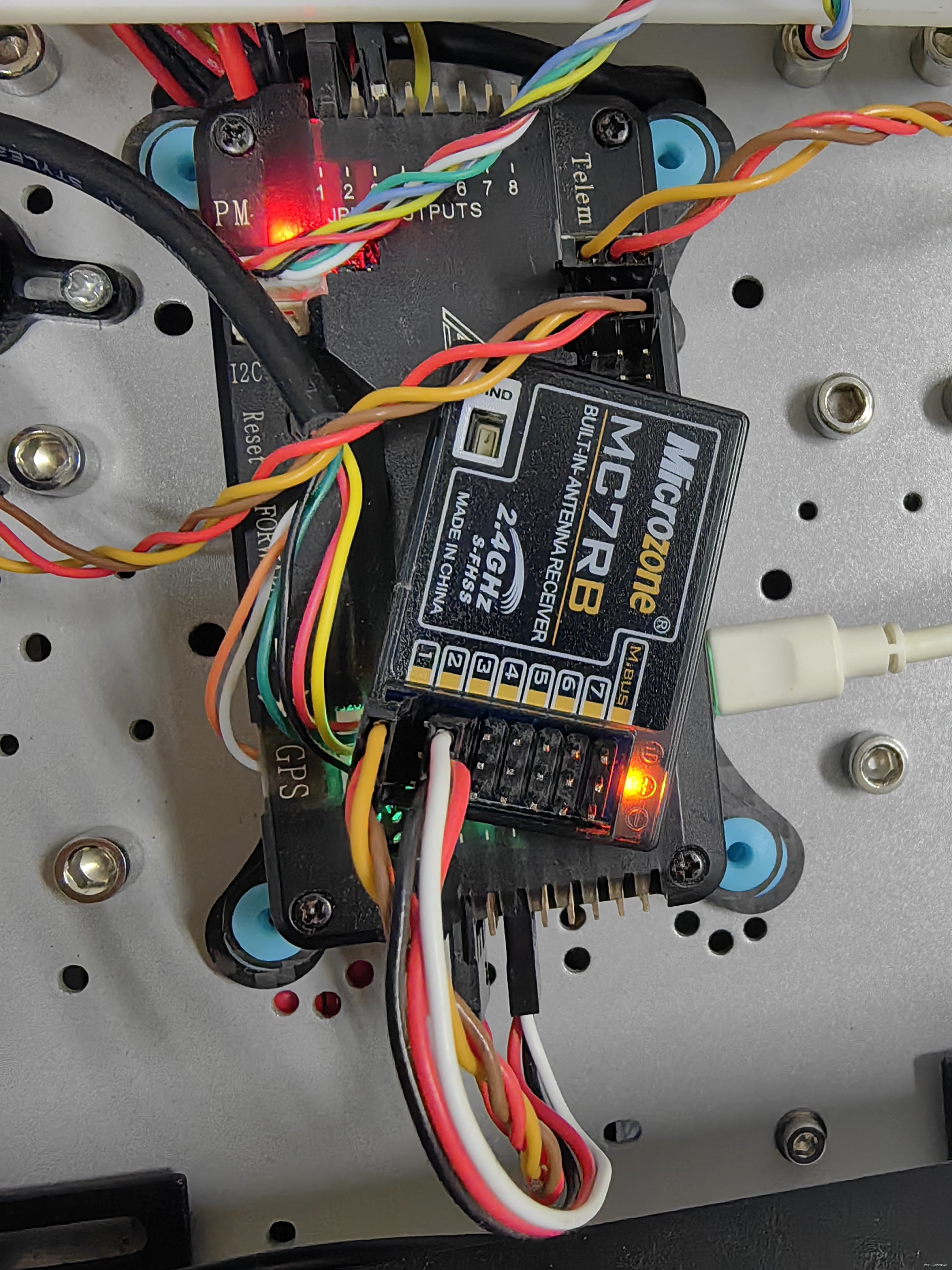
一定要确保遥控器模式准确,尤其是使用没有屏幕的mc6c、乐迪t8fb等。要确保遥控器接收机灯常亮而不是闪烁。
此时,由于无人车地面运动,需要1、3通道,故只有这两的通道有反应。其中3通道为油门,1通道为航向。这里和电机也有关系,涉及到差速和电机类型,具体问题具体分析。尤其是驱动板有的同时驱动两个步进电机,要对应安装,将通道链接到APM飞控的output。将遥控接收机的1、3通道连接到飞控的input。
3.设置辅助通道。
如果需要后期安装机械爪、云台等,需要设置5、6等通道。观察地面站显示,指定旋钮位置。
4.此时问题来了,如果接收机直接驱动机械爪,极有可能瞬间导致电压下降,从而触发失控保护,进一步导致车辆瞬间失控,例如加速前进。
所以必须在支撑起轮胎或履带的前提下进行调试,而且要在临近低电压的时间调试。有时故障不是出现在满电状态,而是在临近低压保护阈值导致各种紊乱。估计这和低电平信号的触发有关。
此时,可以尝试不同品牌的遥控器。

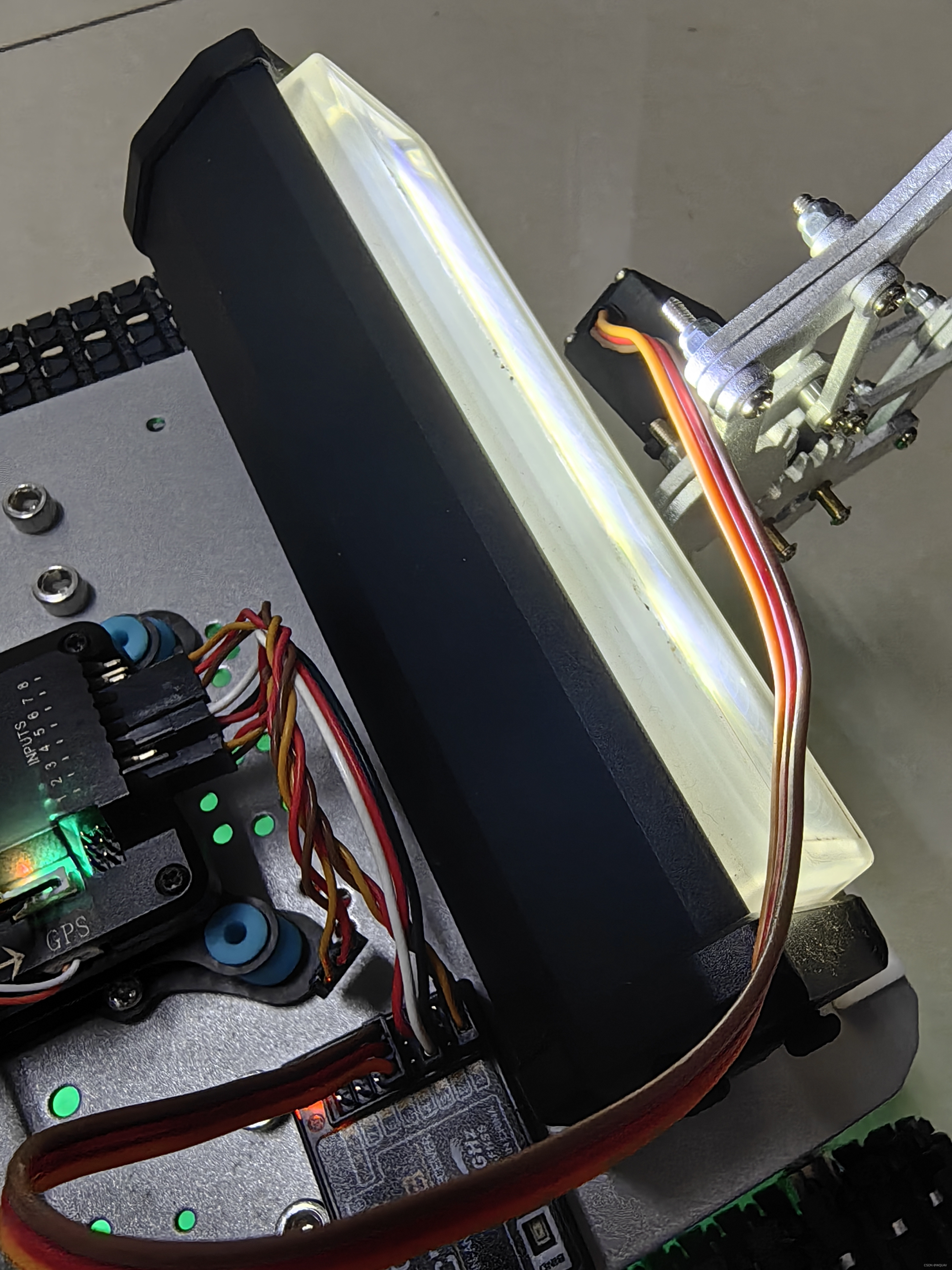
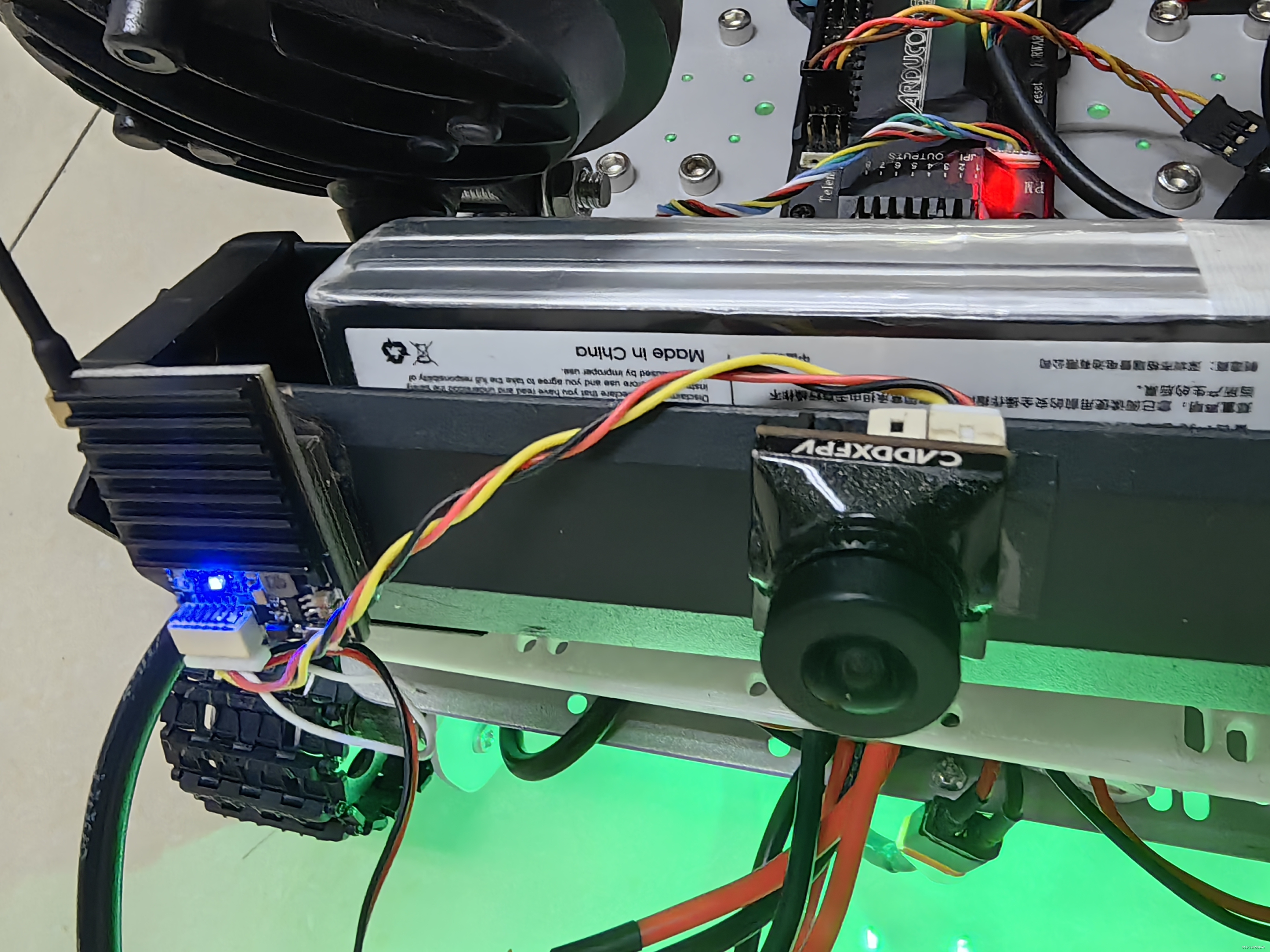
5.图传的问题。必须看好电压功率。下图为图传摄像头一体,5V,如果不适配电压用了3S电池并联立刻会烧掉冒烟!下图为前视摄像头。
6.后视摄像头为分体式,宽电压,可以使用12V直接链接。
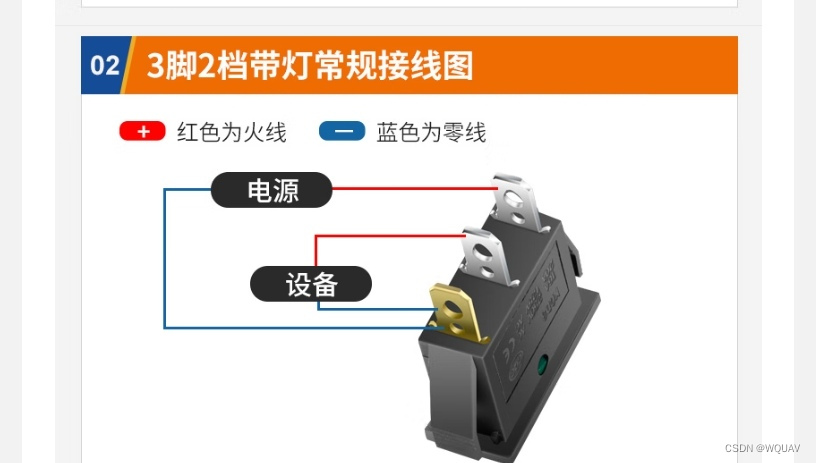
7.在电池连接时,最好串联一个开关,以备应急快速关机。同时避免了频繁插拔电池。还可以在电池上安装哔哔响测电器,实时观察电压变化。电压波动可能导致不可预料的操作失控。

99%的人还看了
相似问题
- ToDesk提示通道限制 - 解决方案
- 视频云存储EasyCVR平台国标接入获取通道设备未回复是什么原因?该如何解决?
- 人工智能-卷积神经网络之多输入多输出通道
- 双通道 H 桥电机驱动芯片AT8833,软硬件兼容替代DRV8833,应用玩具、打印机等应用
- 安防监控系统EasyCVR平台设备通道绑定AI算法的功能设计与开发实现
- 【halcon】获取图片通道数
- NI‑9237国产化50 kS/s/ch,桥模拟输入,4通道C系列应变/桥输入模块
- NI-9219 100 S/s/ch国产化4通道C系列通用多功能模拟输入模块,支持多种传感器
- 【C++的OpenCV】第十四课-OpenCV基础强化(三):单通道Mat元素的访问之data和step属性
- LiveNVR监控流媒体Onvif/RTSP常见问题-分配展示接入的通道没有云台控制按钮云台控制灰色无法操作怎么办?
猜你感兴趣
版权申明
本文"基于APM(PIX)飞控和missionplanner制作遥控无人车-从零搭建自主pix无人车无人坦克":http://eshow365.cn/6-34583-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!
- 上一篇: 五、计算机网络
- 下一篇: Google Aviator语法手册