已解决
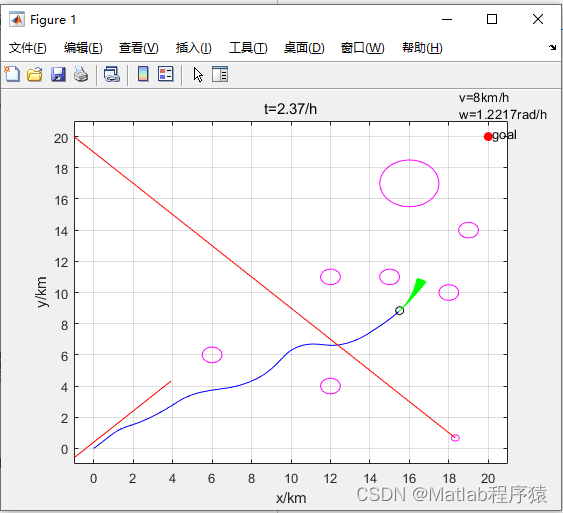
【MATLAB源码-第64期】matlab基于DWA算法的机器人局部路径规划包含动态障碍物和静态障碍物。
来自网友在路上 175875提问 提问时间:2023-11-05 20:45:00阅读次数: 75
最佳答案 问答题库758位专家为你答疑解惑
操作环境:
MATLAB 2022a
1、算法描述
动态窗口法(Dynamic Window Approach,DWA)是一种局部路径规划算法,常用于移动机器人的导航和避障。这种方法能够考虑机器人的动态约束,帮助机器人在复杂环境中安全、高效地移动。下面是DWA算法的详细描述:
1. 动态窗口的概念
动态窗口法的核心概念是“动态窗口”,这是在速度空间中划定的一个区域。这个窗口的大小和位置取决于机器人当前的速度以及其动态约束(如最大加速度、最大速度等)。动态窗口包含了机器人在下一时刻可能达到的所有速度状态。
2. 速度样本
算法在动态窗口内对速度进行采样,生成一系列可能的速度状态(线速度和角速度的组合)。每个速度样本对应一个可能的机器人运动轨迹。
3. 轨迹生成
对于每个速度样本,算法会生成一条预测的运动轨迹。这个轨迹是基于机器人的运动学模型计算得到的,它表示了如果机器人以这个速度状态移动,未来一段时间内它的位置和方向将如何变化。
4. 轨迹评价
生成的轨迹需要根据一定的标准进行评价。这些评价标准通常包括:
- 目标方向:轨迹是否朝向目标?
- 避障能力:轨迹是否能够避开障碍物?
- 速度:轨迹是否能够以较高的速度移动?
根据这些标准,算法会为每条轨迹分配一个评分。
5. 选择最优轨迹
根据轨迹评分,算法选择分数最高的轨迹,并将对应的速度状态作为机器人在下一时刻的控制命令。
6. 执行控制命令
机器人接收控制命令,调整其速度状态,向最优轨迹方向移动。
7. 循环迭代
DWA算法在机器人运动过程中不断重复上述步骤,以实现实时的路径规划和避障。
优点与缺点
优点:
- 能够考虑机器人的动态约束。
- 实时性好,适用于动态环境中的避障。
缺点:
- 依赖于准确的运动学模型和环境信息。
- 在某些复杂环境中可能会出现局部最优解问题。
总体来说,动态窗口法是一种高效且可靠的局部路径规划算法,适用于许多需要快速响应和避障的移动机器人应用场景。
2、仿真结果演示
3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片
查看全文
99%的人还看了
相似问题
- 自动驾驶算法(九):多项式轨迹与Minimun Snap原理与Matab代码详解
- 全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发
- Unity地面交互效果——2、动态法线贴图实现轨迹效果
- 【验证码系列】用逆向思维深度分析滑动验证码(含轨迹算法)
- GPS学习(一):在ROS2中将GPS经纬度数据转换为机器人ENU坐标系,在RVIZ中显示坐标轨迹
- 【OpenCV实现鼠标绘图,轨迹栏做调色板,图像的基本操作】
- 圆通快递订单创建接口asp版,面单打印接口asp版,asp圆通快递物流轨迹查询接口
- 基于MATLAB的GPS卫星绕地运行轨迹动态模拟仿真
- 论文笔记(整理):轨迹相似度顶会论文中使用的数据集
- 【100天精通Python】Day69:Python可视化_实战:导航定位中预测轨迹和实际轨迹的3D动画,示例+代码
猜你感兴趣
版权申明
本文"【MATLAB源码-第64期】matlab基于DWA算法的机器人局部路径规划包含动态障碍物和静态障碍物。":http://eshow365.cn/6-32989-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!
- 上一篇: 算法设计与分析第三章作业
- 下一篇: 关于编程不得不说的事