已解决
机器人制作开源方案 | 杠杆式6轮爬楼机器人
来自网友在路上 152852提问 提问时间:2023-10-14 03:09:06阅读次数: 52
最佳答案 问答题库528位专家为你答疑解惑
1. 功能描述
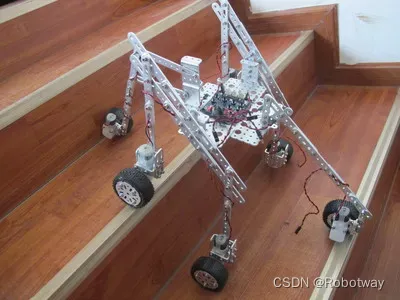
本文示例将实现R281b样机杠杆式6轮爬楼机器人爬楼梯的功能(注意:演示视频中为了增加轮胎的抓地力,在轮胎上贴了双面胶,请大家留意)。
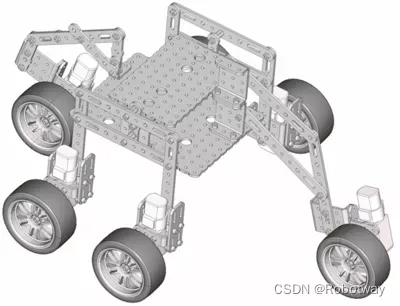
2. 结构说明
杠杆式6轮爬楼机器人是一种专门用于爬升楼梯或不平坦地面的机器人,它采用了杠杆原理和六个特殊设计的轮子。具备以下特点:
① 杠杆原理:机器人利用杠杆原理来提供抬升和支撑力,以适应爬升楼梯或不平坦地面的需求。通过调整杠杆的角度和长度,可以产生足够的力量来克服阻力并保持稳定。
② 六轮六驱:该机器人配备六个驱动轮,布置成两组三个轮子。每组的轮子之间有一定的间距,以保证在爬升楼梯或行走时能够保持稳定性。这种布局还可以提供良好的承载能力和平衡性。
③ 驱动系统:机器人的每个轮子都配备了独立的驱动装置,采用直流马达作为动力源,这样可以实现单独控制每个轮子的转动速度和方向,从而确保机器人在移动过程中的平稳性和灵活性。
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
主控板Basra主控板(兼容Arduino Uno)
扩展板Bigfish2.1扩展板
电池7.4V锂电池4. 功能实现
编程环境:Arduino 1.8.19
下面提供一个杠杆式6轮爬楼机器人爬楼梯的参考程序(sketch_sep15b.ino):
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-09-18 https://www.robotway.com/------------------------------*//*本例程采用的是1拖6线进行实验操作*/void setup(){pinMode( 5 , OUTPUT);pinMode( 6 , OUTPUT);}void loop(){moveForward();delay(100000); stopMotors();delay(10000);}void moveForward(){digitalWrite( 5 , HIGH );digitalWrite( 6 , LOW );}void stopMotors() {digitalWrite( 5 , LOW );digitalWrite( 6 , LOW );}5. 扩展样机
本样机有一些简单的扩展案例,如下图所示:
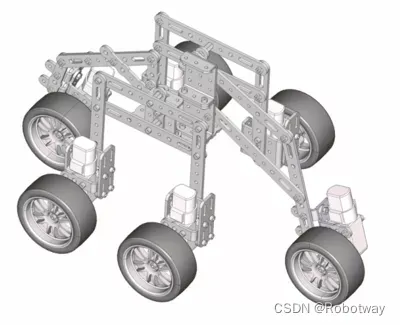
程序源代码及3D样机文件详见 杠杆式6轮爬楼机器人
查看全文
99%的人还看了
猜你感兴趣
版权申明
本文"机器人制作开源方案 | 杠杆式6轮爬楼机器人":http://eshow365.cn/6-19369-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!
- 上一篇: 走进Spark
- 下一篇: USB 转串口芯片 CH340