已解决
PY32F003F18之比较器问题
来自网友在路上 148848提问 提问时间:2023-09-21 09:38:07阅读次数: 48
最佳答案 问答题库488位专家为你答疑解惑
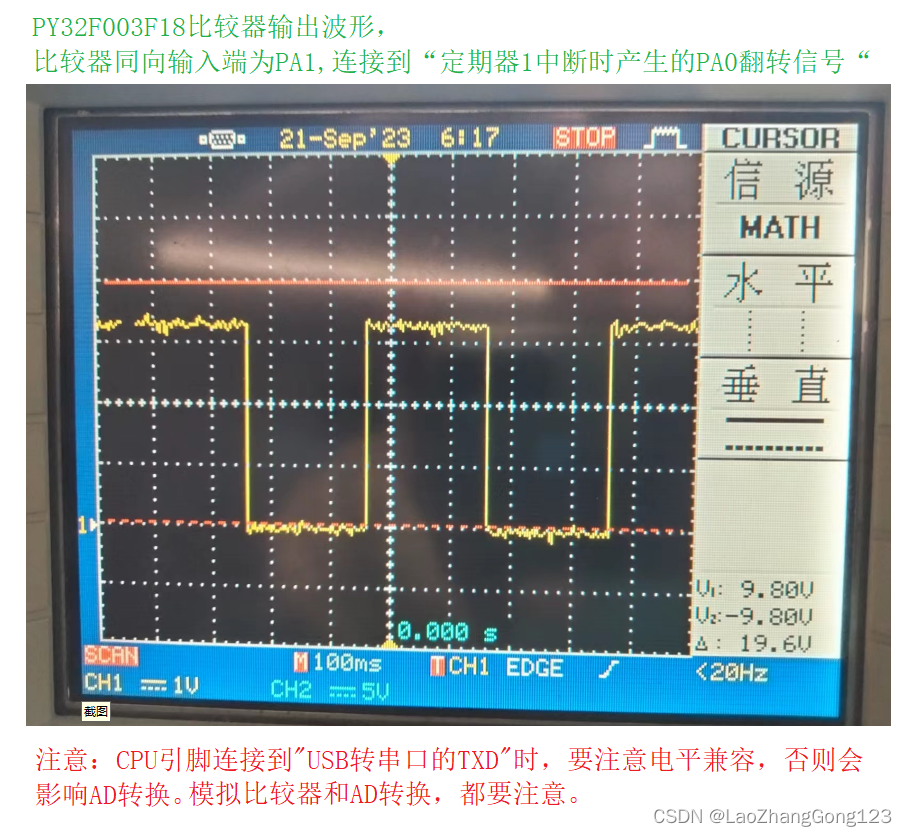
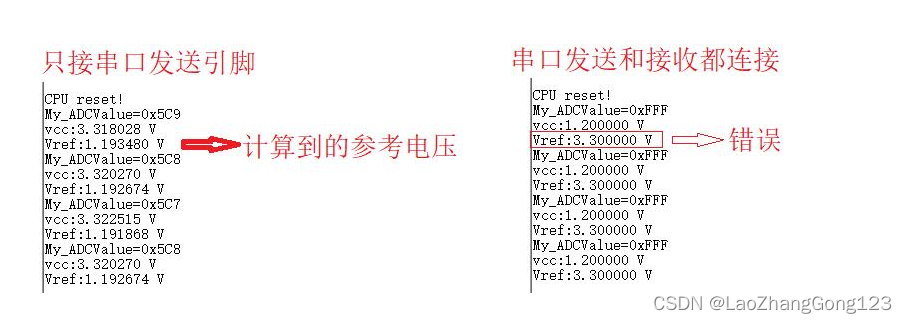
PY32F003F18的模拟模块,其内部参考电压容易受到电源电压影响。当我连接"USB转串口的RXD"时,PC接收到模拟数据均正常;当我连接“USB转串口的TXD”时,发现内部参考电压的AD值为0xFFF。断开连接的“USB转串口的TXD”,模拟功能模块又恢复正常。于是用万用表测量“USB转串口的TXD”的电压,开路电压为5V,CPU电压为3.3V。难道是因为接入这个TXD导线的原因吗?经过反复测试,AD转换和模拟比较器都会受到这个电压影响。
测试代码:
COMP比较器功能:
比较器正端输入:PA1
比较器负端输入:VREFINT
比较器的输出端口:PA6作为
通过调整PA1上的输入电压,观测PA6引脚上的电平变化
使用步骤:
1. 配置PA1输入电压小于1.1V,检测PA06应该输出低电平,
2. 配置PA1输入电压大于1.3V,检测PA06应该输出高电平。
3. 每进一次比较器中断,翻转PB5
#include "Comparator.h"
#include "LED.h"/*
COMP比较器功能:
比较器正端输入:PA1
比较器负端输入:VREFINT
比较器的输出端口:PA6作为
通过调整PA1上的输入电压,观测PA6引脚上的电平变化使用步骤:
1. 配置PA1输入电压小于1.1V,检测PA06应该输出低电平,
2. 配置PA1输入电压大于1.3V,检测PA06应该输出高电平。
3. 每进一次比较器中断,翻转PB5
*/COMP_HandleTypeDef hcomp1;void Comparator_Init(void);
void TIM1_COUNTERMODE_UP_Init(uint16_t arr,uint16_t psc);//函数功能:TIM1中基本计数功能,并使能了更新中断,每次重装ARR值时会产生一次更新中断
//arr:自动重装值。
//psc:时钟预分频数
//TIM1_COUNTERMODE_UP_Init(20000,240);//若使用HSE,当arr=20000,psc=240时,则为200ms,误差为10us;
//TIM1_COUNTERMODE_UP_Init(20000,80);//若使用HSI,当arr=20000,psc=80时,则为200ms,误差为10us;
void TIM1_COUNTERMODE_UP_Init(uint16_t arr,uint16_t psc)
{TIM_HandleTypeDef TIM1_HandleStructure;//HAL_TIM_Base_MspInit开始/__HAL_RCC_TIM1_CLK_ENABLE(); //使能TIM1时钟HAL_NVIC_SetPriority(TIM1_BRK_UP_TRG_COM_IRQn, 0, 0); //设置中断优先级HAL_NVIC_EnableIRQ(TIM1_BRK_UP_TRG_COM_IRQn); //使能TIM1中断
//HAL_TIM_Base_MspInit结束/TIM1_HandleStructure.Instance = TIM1; //选择TIM1TIM1_HandleStructure.Init.Period = arr-1;//设置在下一个更新事件产生时,装入"自动重载入寄存器TIMx_ARR"的值//将(arr-1)写入"自动重载入寄存器TIMx_ARR",设置自动重装载值TIM1_HandleStructure.Init.Prescaler = psc-1;//设置用来作为TIMx时钟频率除数的预分频值//将(psc-1)写入"预装载寄存器TIMx_PSC",的PSC[15:0],设置预分频值//计数器的时钟频率CK_CNT=fCK_PSC/(PSC[15:0]+1)TIM1_HandleStructure.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;//时钟不分频,则tDTS=tCK_INT//若使用HSE,计算公式:arr*psc/24000000/1,当arr=20000,psc=240时,则为200ms,误差为10us;//若使用HSI,计算公式:arr*psc/8000000/1,当arr=20000,psc=80时,则为200ms,误差为100us;TIM1_HandleStructure.Init.CounterMode = TIM_COUNTERMODE_UP;//向上计数TIM1_HandleStructure.Init.RepetitionCounter = 1 - 1;//不重复计数//将(1-1)写入"重复计数寄存器TIMx_RCR"中的REP[7:0],设置"重复计数器值"TIM1_HandleStructure.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;//"自动重装载寄存器"没有缓冲//不允许将"TIMx自动重新加载寄存器TIMx_ARR"的值被装入缓冲区;HAL_TIM_Base_Init(&TIM1_HandleStructure); //TIM1初始化//选择计数器模式:向上计数//设置时钟分频因子:时钟不分频,则tDTS=tCK_INT//设置自动重装载:"自动重装载寄存器"没有缓冲//设置自动重装载值:TIM_Base_InitStructure.Period//设置预分频值:TIM_Base_InitStructure.Prescaler//设置"重复计数器值":TIM_Base_InitStructure.RepetitionCounter//启动更新事件:将TIMx_EGR中的UG位置1,由软件产生更新事件HAL_TIM_Base_Start_IT(&TIM1_HandleStructure);//允许计数器产生"更新中断";//如果计数器不是工作在触发模式中,则开始计数
}void HAL_COMP_MspInit(COMP_HandleTypeDef *hcomp)
{GPIO_InitTypeDef GPIO_InitStructureure;if(hcomp->Instance == COMP1){__HAL_RCC_GPIOA_CLK_ENABLE();//使能GPIOA时钟__HAL_RCC_COMP1_CLK_ENABLE();//使能COMP1时钟__HAL_RCC_COMP2_CLK_ENABLE();//使能COMP2时钟//PA1配置为模拟输入COMP1_INP2GPIO_InitStructureure.Pin = GPIO_PIN_1; //选择第1脚GPIO_InitStructureure.Pull = GPIO_PULLDOWN; //引脚下拉被激活GPIO_InitStructureure.Speed = GPIO_SPEED_FREQ_HIGH; //配置GPIO速度为高GPIO_InitStructureure.Mode = GPIO_MODE_ANALOG; //设置引脚工作模式为模拟输入模式HAL_GPIO_Init(GPIOA,&GPIO_InitStructureure);//根据GPIO_InitStructure结构变量指定的参数初始化GPIOA的外设寄存器//PA6映射到COMP1_OUT,配置为输出GPIO_InitStructureure.Pin = GPIO_PIN_6; //选择第6脚GPIO_InitStructureure.Pull = GPIO_PULLDOWN; //引脚下拉被激活GPIO_InitStructureure.Speed = GPIO_SPEED_FREQ_HIGH; //配置GPIO速度为高GPIO_InitStructureure.Mode = GPIO_MODE_AF_PP; //复用功能推挽输出模式GPIO_InitStructureure.Alternate = GPIO_AF7_COMP1; //选择AF7,将PA6复用为COM1_OUTHAL_GPIO_Init(GPIOA, &GPIO_InitStructureure); //初始化GPIOHAL_NVIC_EnableIRQ(ADC_COMP_IRQn); //使能COMP中断HAL_NVIC_SetPriority(ADC_COMP_IRQn,0x01, 0);//设置COMP1中断优先级为0x01,0无意义}if(hcomp->Instance == COMP2){}
}//函数功能:比较器1初始化
void Comparator_Init(void)
{hcomp1.Instance = COMP1; //选择COM1hcomp1.Init.InputMinus = COMP_INPUT_MINUS_VREFINT; //比较器负输入端为VREF(1.2V)hcomp1.Init.InputPlus = COMP_INPUT_PLUS_IO3; //比较器正输入端选择为PA1,pin PA1 for COMP1hcomp1.Init.OutputPol = COMP_OUTPUTPOL_NONINVERTED; //COMP1极性选择为不反向hcomp1.Init.Mode = COMP_POWERMODE_HIGHSPEED; //COMP1功耗模式选择为High speed模式hcomp1.Init.Hysteresis = COMP_HYSTERESIS_DISABLE; //迟滞功能关闭hcomp1.Init.WindowMode = COMP_WINDOWMODE_DISABLE; //WIODOW关闭hcomp1.Init.TriggerMode = COMP_TRIGGERMODE_IT_RISING_FALLING; //COMP1上升/下降沿触发HAL_COMP_Init(&hcomp1);//COMP1初始化HAL_COMP_Start(&hcomp1);
}void HAL_COMP_TriggerCallback(COMP_HandleTypeDef *hcomp)
{if(hcomp1.Instance == COMP1){MCU_LED_Toggle();}
}//函数功能:比较器1中断服务程序
void ADC_COMP_IRQHandler(void)
{HAL_COMP_IRQHandler(&hcomp1);
}//函数功能:TIM1中断服务程序
//200ms中断一次
void TIM1_BRK_UP_TRG_COM_IRQHandler(void)
{
HAL_TIM_PeriodElapsedCallback开始/if (_HAL_TIM_GET_FLAG(TIM1,TIM_FLAG_UPDATE) != RESET){//根据TIM_FLAG_UPDATE,读"TIMx状态寄存器(TIMx_SR)"中更新中断标志位_HAL_TIM_CLEAR_IT(TIM1, TIM_IT_UPDATE);//TIM_IT_UPDATE,令UIF=0,清除定时器更新中断标志位TIM1_LED_Toggle();}
HAL_TIM_PeriodElapsedCallback结束/
}#include "py32f0xx_hal.h"
#include "SystemClock.h"
#include "delay.h"
#include "LED.h"
#include "SystemClock.h"
#include "Comparator.h"
//#include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf()
//#include "string.h" //使能strcpy(),strlen(),memset()const char CPU_Reset_REG[]="\r\nCPU reset!\r\n";int main(void)
{HSE_Config();
// HAL_Init();//systick初始化delay_init();HAL_Delay(1000);// USART2_Init(115200);
//PA0是为USART2_TX,PA1是USART2_RX
//中断优先级为0x01
//波特率为115200,数字为8位,停止位为1位,无奇偶校验,允许发送和接收数据,只允许接收中断,并使能串口
// printf("%s",CPU_Reset_REG);MCU_LED_Init();TIM1_LED_Init();TIM1_COUNTERMODE_UP_Init(20000,240);//若使用HSE,当arr=20000,psc=240时,则为200ms,误差为10us;Comparator_Init();while (1){delay_ms(100);
// MCU_LED_Toggle();}
}注意:普冉单片机PY32F003F18,国产ARM芯片,在使用模拟量时,一定要注意CPU的“IO输入电压”要小于等于“CPU电源电压”,否则,会导致AD转换错误。切记踩坑啊!!!
查看全文
99%的人还看了
相似问题
- 电压放大器实验可以研究哪些领域
- 【STM32 开发】| INA219采集电压、电流值
- josef约瑟低电压继电器 DY-110 10-109V 辅助电源·DC110V 嵌入式面板安装
- 怎么理解电流超前电压、电压超前电流?
- 基于MATLAB的电流、电压互感器特性的仿真分析
- PaddleX场景实战:PP-TS在电压预测场景上的应用
- 【STM32】HAL库ADC多通道精准测量(采用VREFINT内部参考电压)
- 纳米软件电源模块测试系统助力电压输入缓慢变动测试 解决测试痛点
- Proteus仿真--量程自动切换数字电压表(仿真+程序)
- 电源模块测试用例科普:如何调整电压调整率?ATECLOUD-POWER测试系统能否测试?
猜你感兴趣
版权申明
本文"PY32F003F18之比较器问题":http://eshow365.cn/6-10603-0.html 内容来自互联网,请自行判断内容的正确性。如有侵权请联系我们,立即删除!